Mitigating Work Zone Safety and Mobility Challenges through Intelligent Transportation Systems
Case Studies
CHAPTER 3 - TRAFFIC MOBILITY PERFORMANCE SPECIFICATION MONITORING USING ITS: BANGERTER HIGHWAY, UT
The Utah Department of Transportation (UDOT) has interest in moving toward performance-based specifications for its projects, including performance specifications related to work zone traffic control. Rather than prescribing how a project is to be completed with respect to temporary traffic control sequencing and methods, a performance-based specification establishes key safety and mobility requirements and thresholds that have to be met, and allows the contractor to determine how best to complete the project while conforming to those specifications. For example, a transportation agency would specify that travel delays within the limits of a project not be increased by more than some duration or some percent of normal travel times, and it would be up to the contractor to determine how to complete the work in a manner that did not exceed those thresholds.
The advantage to this approach is that it allows the contractor to be more innovative and have more control over how to best complete the project. However, this approach requires the agency to monitor the work zone and determine if and when the contractor is not meeting the specification. UDOT pilot tested the use of Bluetooth matching technology for monitoring point-to-point travel times as a way to assess the feasibility of a mobility-related performance specification on a roadway improvement project.
Overview of the Project
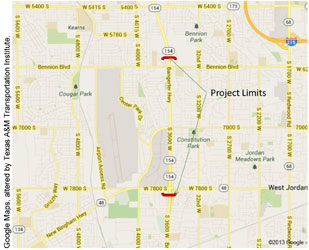
A design-build (DB) project on the Bangerter Highway (SH 154) in Salt Lake City, an arterial with signal operations at major intersections, offered an opportunity to test the potential of using a traffic mobility performance-based specification and assigning liquidated damages according to conformance with that specification. Figure 8 illustrates the project limits. The project involved the construction of three continuous flow intersections and one grade-separated interchange from August 2011 to April 2012. The intersections served a significant amount of traffic (56,000 vehicles per day on Bangerter Highway, and between 18,000 and 31,000 vehicles per day on the cross-streets at each of the intersections).
While UDOT was interested in the concept of performance measurement for work zone mobility, it was not confident in moving to a performance-based specification directly. Therefore, the decision was made to bid the project with traditional prescriptive requirements for traffic control in terms of restrictions on hours of allowable lane closures and maximum number of lanes that could be closed. At the same time, a hypothetical performance specification was developed and would be tracked during the project. Then comparisons would be made between the liquidated damages that arose due to violations of the prescriptive traffic control requirements and those that would have arisen if the performance-based specification had been used.
Applicability of the Engineering Design Process
Defining the Problem
|
Key Problems
|
UDOT was concerned about travel times and construction-induced delays for both through traffic along Bangerter Highway and for turning traffic to and from the highway and cross streets. Certain travel movements in the corridor already experienced delay during peak travel times, and construction had the potential to significantly increase the delays. To limit the potential for increased delays, UDOT could impose limitations on the contractor through prescriptive specifications or encourage the contractor to minimize traffic delays through a performance-based specification. As noted in the previous section, UDOT chose to look at both approaches for this project. To track the performance-based specification, UDOT needed to assess baseline delay, determine reasonable performance thresholds, monitor traffic conditions, and assess what amount of measured delay was due to construction-related impacts. The presence of baseline delay and several cross streets and turning movements increased the complexity of this effort.
Initial discussions with the contractor about the pilot test effort also identified another key challenge: the contractor would not be able to effectively monitor traffic conditions on their own. As a result, they would not be able to quickly detect if a situation had developed that caused them to violate the specification. This would hamper their speed in responding to the problem and lead to longer violation periods and increase the liquidated damages.
Specifying Requirements of a Solution
|
Solution Requirements
|
UDOT identified 48 movements for monitoring of both through traffic on the mainline and for left and right turns at the various intersections. A key requirement for the solution was that it be possible to directly measure travel times and delays of individual vehicles. Furthermore, it was deemed important to be able to measure these travel times/delays for several different origin-destination pairs within the project limits, as the potential existed for the contractor to adversely affect multiple traffic movements at multiple locations within the project.
Identifying and Evaluating Alternatives
A technology option was required to effectively address the specified solution requirements since a non-technology solution would not be able to capture the desired measures. Existing permanent intelligent transportation systems (ITS) in the corridor included cameras and coordinated traffic signal timing, but these were not adequate to monitor movements within the corridor. Since the project was a pilot test effort, the deployment did not follow a typical UDOT ITS deployment approach. The DB consultant/contractor and UDOT worked together to determine the specific requirements of technology needed. Several technologies were considered, such as the use of Sensys magnetometers in the travel lanes, portable traffic monitoring devices, and Bluetooth address matching systems. Ultimately, a Bluetooth solution was determined to be the best choice because current infrastructure did not allow the accurate measurement of cumulative delay through the project segment, which had many access points. A Bluetooth solution most efficiently enabled the ability to measure total delay of various traffic movements through the project limit. Figure 9 illustrates a Bluetooth antenna installation.

Selecting, Designing, and Implementing the Best Solution
A concept of operations was developed for a system that provided the contractor and UDOT with notification when travel times of one of the movements exceeded normal or “typical” values. These baseline values were generated from the Bluetooth system prior to the work zone initiation and validated by traffic simulation runs. Extensive simulation of the corridor was performed to determine what delays would likely occur for the maintenance-of-traffic (MOT) being implemented in each phase of the project. A two-tiered notification process was initially envisioned that would be used to implement a performance-based delay specification. If delays exceeded the first tier threshold, a disincentive penalty would be invoked during the time that the delay exceeded the threshold (if a delay-based performance specification had been enacted on the project). If delays grew to the point that they exceeded the second tier threshold, a higher disincentive penalty would then be enacted. The contractor later requested that a warning level be included lower than the tier 1 threshold, so that there would be some opportunity for the contractor to rectify the situation before financial penalties started accruing.
Once Bluetooth was selected as the solution for this project, UDOT analyzed the project area to determine locations where accurate Bluetooth addresses on a specific roadway segment or intersection approach could be obtained and where the antenna would not be an obstruction to the construction itself.
UDOT has a fairly well-structured process for procuring ITS equipment and services. For this pilot test effort, however, UDOT deviated from that process. Concerns about the time required to go through the traditional procurement process led UDOT to have the contractor purchase the devices on its project contract, and then assign them back to UDOT.
The Bluetooth antennas were either solar or battery powered, and included both GPS and cellular communication capabilities. Prices per device were approximately $4,000 for the battery-powered antenna, and $5,000 for the solar-powered antenna. A total of 10 units were procured and deployed, at a total cost of about $40,000. Another $33,000 was spent on system operation (data access) and maintenance costs for the vendor. Additional costs expended by UDOT and the contractor were not calculated.
Bluetooth detectors were installed by either securing them to roadside infrastructure and/or mounting them high enough to deter theft and vandalism. Data were transmitted from the antenna at regular intervals to a server that matched Bluetooth addresses detected at successive antennas and computed the elapsed time between them. Four cameras were already located within the project, installed under a previous traffic operations center (TOC) contract. The cameras were useful for reviewing conditions in the field when the Bluetooth system indicated that delays were increasing.
Once the antennas were deployed, UDOT and the contractor spent a considerable amount of time calibrating the overall operation of the system. A number of settings on the devices themselves had to be calibrated depending on how traffic was behaving near the antenna itself. Some of the calibration involved settings on the antenna itself, and others in terms of how the data coming in from the detectors were handled during processing. Both UDOT and the contractor team spent a significant amount of time to understand the nuances of the system and to get the system to operate as desired. UDOT and the contractor found it challenging to reach a consensus on the minimum number of Bluetooth matches between antenna locations needed in a given time period to develop a good travel time estimate. Ultimately, a value of 5 Bluetooth matches per 15-minute time period was adopted as the minimum.
Once calibrated, the system worked as intended, and yielded significant benefits to both UDOT and the contractor. The early warning thresholds implemented for the project allowed both parties to become aware of operational problems within the project much sooner than would have been possible otherwise. In many cases, the warning notification led the TOC personnel to use cameras to quickly identify that an incident had occurred and dispatch response personnel. More importantly for the contractor, the availability of the data emboldened the contractor to request the relaxation of lane closure restriction times. The standard UDOT prescriptive MOT requirements in the contract prohibited lane closures each weekday from 6:00 to 9:00 am and from 3:00 to 6:00 pm. The Bluetooth system allowed contractors to request the reduction of those windows at certain locations during certain phases (and in some cases, eliminate one or the other entirely) because the operations data indicated it would result in acceptable impacts.
Although the deployment was primarily a pilot test of the potential usefulness of performance-based contracting of work zone traffic control, UDOT did reach out to some of the local businesses in the corridor who were interested in the system. Periodic updates were provided about what the system was indicating regarding traffic conditions, as well as how the system would have worked in terms of contractor penalties had the specification actually been in place for the contract. Overall, the businesses viewed the potential use of the system favorably. UDOT also reached out through corridor community teams to explain to commuters the reason for the system and how the system operates. Initially, there was some public concern over privacy issues. However, once assured that the Bluetooth addresses were not retained and could not be traced back to them, these fears were alleviated.
Evaluation and Lessons Learned
Usage Statistics and Performance Evaluations
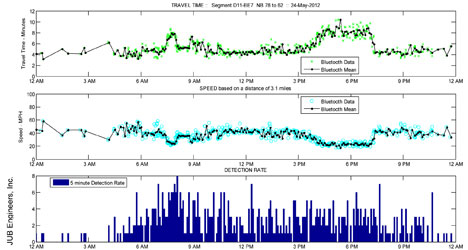
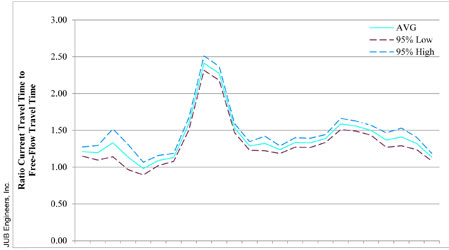
UDOT and the contractor monitored both travel times (directly computed from the Bluetooth system) and the corresponding average speeds on the various segments and movements of interest. Figure 10 illustrates an example of these types of data, as well as data regarding Bluetooth device detections per analysis interval. Specifically, these plots show the individual Bluetooth data and mean travel times and speeds over the course of a day for a given segment, as well as the number of Bluetooth devices detected. Over time, it was possible to establish confidence intervals around the average travel times, and allow both UDOT and the contractor to distinguish between normal day-to-day fluctuations in traffic conditions and truly unusual conditions that warranted attention and remedial actions. Figure 11 shows another example of a data plot generated by the system data to depict the ratio of current travel time versus free flow travel time by time of day with a 95% confidence interval.
The system worked well after UDOT and the contractor became familiar with it and developed an understanding of how to tailor it to the needs of the project. UDOT indicated that they are investigating other projects on which to employ this type of technology. They noted that this pilot test project was a DB contract that allowed the contractor much more flexibility and input in the MOT process, where a performance-based specification might be more suitable. It was unclear whether specification language could be drafted in a way that would be acceptable to contractors in a more traditional design-bid-build environment where the MOT approach (and construction methods in many cases) had already been set by UDOT.
UDOT and the contractor continuously monitored the performance of the system. In addition, they performed a case study of applying the performance-based specification versus their traditional prescriptive-based MOT specification during an instance where the contractor experienced some equipment problems (a striper truck broke down, which did not allow them to open up a travel lane in time). Penalties that would have been instituted with the performance-based specification had it been effect were compared to penalties that would have been incurred by the contractor through the prescriptive-based specification in the contract. Overall, UDOT and the contractor estimated that the prescriptive specification resulted in a $75,000 penalty for the contractor, whereas the performance-based specification would have resulted in a $68,000 to $69,000 penalty. The similarity of these two values gave UDOT confidence that a performance-based specification could indeed be established and would yield reasonable and defendable financial penalty outcomes for the contracting community if enforced.
Lessons Learned
The main intent of the pilot test of the Bluetooth technology was to assess the potential usefulness of a performance-based specification for work zone traffic mobility. ITS was used to enable UDOT to monitor actual traffic conditions to assess compliance with the theoretical specification. UDOT, working with the contractor, identified a number of lessons learned that they intend to apply in the future to eventually use this approach (as appropriate) on key projects where maintenance of traffic mobility is particularly critical.
Lessons learned from this testing effort are summarized below.
It is important to ensure that the level of monitoring effort match the needs of the project – For this testing effort, UDOT and the contractor monitored 48 different movements through the project. In retrospect, there were only a few key movements that were of primary interest. A reduced set of travel times would have reduced the data analysis burden, and likely led to similar ability by UDOT to monitor construction impact on travelers.
Adequate advance time is needed between Bluetooth detector installation time and the start of the project – The calibration efforts undertaken by UDOT and the contractor to get the devices and overall system operating at a high degree of accuracy and reliability took about 2 weeks.
Bluetooth reader placement and settings will affect monitoring accuracy on routes with many access points for businesses – Bluetooth readers use an antenna with a circular detection range. Vehicles with Bluetooth devices enter into that circular detection field, are read, and then exit. Normally, this process will take only 1-2 seconds. However, if the reader is located near businesses or at signalized intersections, vehicles may sit within the detection zone for a fairly long time and be detected repeatedly. Proper calibration of the reader and processing system to use the appropriate detection time of the device (i.e., first detection, last detection, etc.) at a given reader may be needed to maximize the accuracy and reliability of the data obtained.
A significant traffic simulation effort is needed to establish realistic and acceptable thresholds – UDOT and the contractor found that it was not sufficient to look at only peak operating periods with the simulation. A contractor may choose to implement lane closures and other actions during off-peak conditions, and the impacts of those actions may be of interest to an agency. Such actions would need to be monitored and penalties for excessive impacts identified during those times as well.
An ability to identify and document non-construction-related impacts that may occur (i.e., incidents) is important – The ability to separate actions due to contractor decisions and behaviors from events out of the contractor’s control will be important for implementing any type of performance-based specification for work zone mobility. Some incidents may be the result of contractor decisions (e.g., a rear-end crash due to a queue that occurred when the contractor closed a lane) while others may not be. Distinguishing between the two?or determining appropriate allocations when responsibility is shared?will be an ongoing challenge for agencies and contractors to reach agreement on in the future.
< Previous | Next >