Appendix M: CORSIM Path Following Capability
The path following capability in CORSIM was developed to test the Dynamic Traffic Assignment (DTA) prototypes being developed for FHWA 3. An extensive set of functions was developed to allow the DTA system to interact with CORSIM at run time. A file-based interface that interacts with CORSIM during the simulation is included in CORSIM, but it is currently undocumented and unsupported. The path following capability works by reading two input files that specify the paths and the vehicles that follow the paths. If the input file is named “case.trf,” then the path file must be named “case.pat” and the vehicle file must be named “case.veh.” Any run of CORSIM will look for these files and try to use them if they are in the same directory with the file that is being run.
The path definition must start and end with an 8000 node. The number of paths is limited to 5,000, which should be more than enough for any network that CORSIM could model. The format for the path file, along with an example file, is displayed in Figure 114.
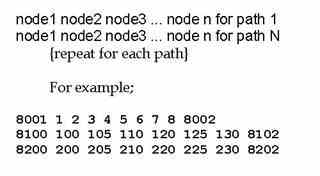
Figure 114. Illustration. Path file format and example for path following.
The format for the vehicle file is: entry time (the second that the vehicle enters the network), entry node, path ID (path IDs are the sequence number in the path file), driver type, vehicle fleet, and vehicle type. All of these entries are included on a single line separated by spaces. A new line is created for each driver type-vehicle type combination that the analyst wants to follow a certain path. An example of the vehicle format file is shown in Figure 115.
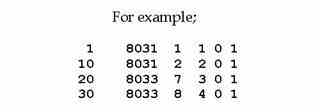
Figure 115. Illustration. Example of the vehicle file for path following.
The vehicles will be injected into the stream of vehicles at the time specified. These vehicles will interact with other vehicles created by CORSIM via the Record Type (RT) 50 if entry volumes are input. If the entry volumes are zero, only the injected vehicles will be present on the network.
Probe Vehicle Tracking File
As a method to check the entry and exit times of a path following vehicle, a probe vehicle file is created when path following vehicles are injected into the network. If the input file is named “case.trf,” then the probe file will be named “case.prb.” The format for the probe file is: time, vehicle ID, the text “ENTRY” or “EXIT”, path ID, and the node number for either the entry or exit node of choice. An example of the probe vehicle tracking file is shown in Figure 116.
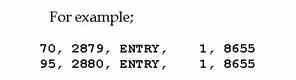
Figure 116. Illustration. Example of the probe file format for path following.
3 This capability was designed for research purposes and can be quite tedious for large networks or large volumes of vehicles. At this time there is no intention of creating a user interface for this functionality or supporting it further.