Regents of the University of Michigan Response to USDOT NOFO 693JJ317NF0001 - ATCMTD
1. Ann Arbor Integrated Mobility System (AAIMS) Overview
The University of Michigan (UM) has assembled a stellar consortium of public and private entities and affiliates to deploy the Ann Arbor Integrated Mobility System (AAIMS). The consortium includes Ford Motor Company and the City of Ann Arbor, and affiliates Michigan Department of Transportation, Delphi, Econolite, and WSP. The team members' individual talents, experiences, and assets will synergistically build upon each other to integrate and deploy a scalable state-of-the-art connected vehicle and mobility transportation initiative that expands upon the existing Ann Arbor environment. The AAIMS consortium has worked together to develop a deployment plan to manage congestion, improve mobility, and increase safety in Ann Arbor. AAIMS will serve citizens, students, and visitors alike. Furthermore, AAIMS lays the groundwork for real-world, extensive deployment of highly automated and autonomous vehicles.
This deployment initiative spans three years and will cost $23,911,987: $11,056,579 federal funds and $12,855,408 cost share funds. The cost share consists of $8,150,000 in cash, and $4,705,407 in-kind (goods and services).
1.1. Project Description
The Ann Arbor Integrated Mobility System (AAIMS) is a proposed deployment of multiple mobility, congestion management and connected solutions in Ann Arbor, Michigan which could become a template for integrated mobility systems in mid-sized cities. In addition to addressing a variety of advanced transportation modes and services, AAIMS will significantly advance the management of the traffic environment in which they operate, and improve safety for all road users. The system would operate in a manner that is scalable, yet is a substantial leap in the advancement of integrated mobility solutions. It is the consortiums intent to continuously build upon the AAIMS program with additional deployments of technologies and mobility services well beyond the items included in this proposal. AAIMS addresses critical barriers that hinder mobility and deployment of connected vehicle technologies. As such, and given its proximity to the largest concentration of transportation research and development facilities in the world, the AAIMS program is extremely well positioned to support the deployment of additional technologies and services in support of industry, roadway operators, and the conduct of research.
The City of Ann Arbor is uniquely positioned to deploy the most advanced transportation and congestion management technologies given its established and extensive connected vehicle and infrastructure network. This network will include 70 signalized intersections located across the City and 2200 vehicles by the end of 2017. AAIMS proposes to significantly enhance the efficiency of the transportation system in Ann Arbor by providing on-demand mobility and route optimization to address the first/last mile challenge of transit, fixed and dynamic shuttle services from Park & Ride lots, transit signal prioritization, increased pedestrian and bicycle safety, improved congestion management, dynamic traffic signal control using traditional connectivity as well as pseudo basic safety messages (BSMs), and improved incident and event management. The combination of these efforts form the basis of a transportation operating system the consortium deems necessary to support the future deployment of highly automated and autonomous vehicles. Given the existing system, its continuous operation over five years, including engagement of the roadway operators, and extensive experience with this environment, we anticipate no regulatory, legislative, or institutional challenges.
AAIMS will be championed by an established consortium of the University of Michigan, Ford Motor Company, and the City of Ann Arbor, with assistance and contributions from MDOT, the Econolite Group, Delphi Corporation, and WSP. The consortium offers a one-of-a-kind opportunity to leverage the largest operational deployment of connected vehicles and infrastructure in the nation, and in doing so, take significant advantage of previous investments made by the U.S. DOT, the State of Michigan, the University of Michigan, Ford Motor Company, and the City of Ann Arbor. The core of the consortium includes the demonstrated deployment capabilities of UM and the City of Ann Arbor (i.e., Connected Vehicle Safety Pilot Model Deployment and Ann Arbor Connected Vehicle Test Environment), and further strengthens it with the unequalled experience of Ford Motor Company and Ford Smart Mobility in deploying numerous innovative, commercially-viable mobility initiatives around the globe which address connectivity, mobility, autonomous vehicles, consumer experience, as well as data and analytics.
1.2. The Community's Transportation Needs
The City of Ann Arbor is a socially, economically, and culturally diverse community of approximately 117,000 residents, well-known for innovation and forward-thinking. Encompassing 28.7 square miles, the city includes 296.8 miles of roadway, 81.5 miles of bike lanes and 162 signalized intersections. On weekdays, Ann Arbor experiences an average VMT (vehicles miles travelled) of 2,419,000, predominantly associated with employment as well as visitors – particularly patients to the University's Health System. On seven or more weekends each year, the number of visitors to the city regularly exceeds 100,000 individuals in a single day with people attending special events such as collegiate football games, professional soccer games and art fairs. Located in southeast Michigan, Ann Arbor enjoys a varied climate including four distinct seasons and the associated variety of weather conditions in which to evaluate the robustness of mobility solutions.
Currently two partially coordinated transit systems operate in Ann Arbor: the AAATA (The Ride) and the UM Transit, with a combined 152 buses operating on 46 fixed urban routes. The University's fixed route system alone handles 50,000 student and staff riders every day connecting the various regions of the University's Ann Arbor campus, and The Ride has an annual ridership of 6.3 million. With the significant daily influx of people working in at the University alone (42,000 employees), as well as that associated with special events, congestion and parking pose persistent significant challenges to the community. As a university community, Ann Arbor also experiences significant pedestrian and bicyclist traffic, along with the associated safety challenges when motorized and non-motorized modes intersect. Simply getting into Ann Arbor is challenging during peak travel periods, particularly via the US-23 corridor located north and east of the city with daily congestion of traffic entering the city.
1.3. Priority Area Details
Each of the priority areas can be broken down further into functional elements. Figure 1 summarizes the comprehensive elements of advanced transportation and congestion management deployment initiatives comprising AAIMS; each described in following sections.
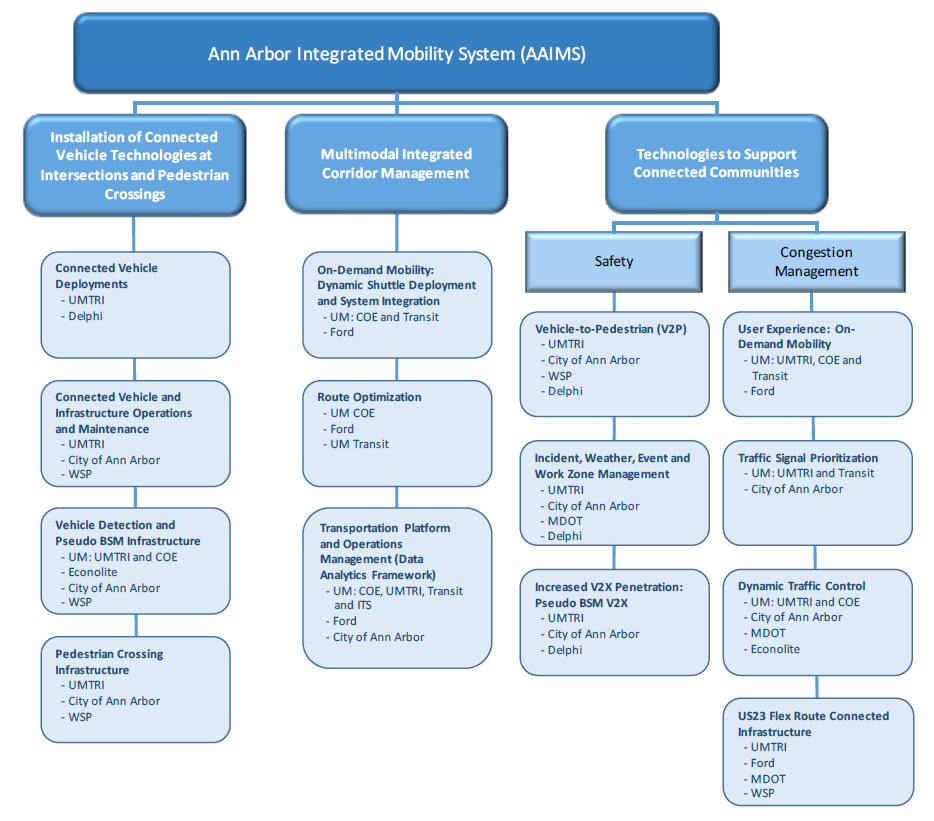
Figure 1: Functional elements of AAIMS; including specific projects and participating organizations by U.S. DOT priority areas
1.3.1. Installation of Connected Vehicle Technologies at Intersections and Pedestrian Crosswalks
The installation of connected vehicle technology is a fundamental building block for the Ann Arbor Integrated Mobility System. AAIMS builds upon the early operational deployment of the Ann Arbor Connected Vehicle Test Environment (DTFH61-15-H-00005) and its predecessor project, the Safety Pilot Model Deployment (DTFH61-11-C-00040). Both projects have deployed Dedicated Short Range Commination (DSRC) infrastructure and vehicle-based technology.
Sarah Tarpgaard, the AACVTE Contracting Officer, has approved that the transfer of items purchased under the AACVTE agreement under $5,000, and the equipment transferred to the University of Michigan Transportation Research Institute (UMTRI) AACVTE agreement from the Safety Pilot Model Deployment contract will become the property of UMTRI at the end of the AACVTE agreement and will vest with UMTRI. UMTRI will use these items and equipment for AAIMS. The purchased items include DSRC devices, DSRC antennas, GNSS antennas, power cables and miscellaneous installation supplies valued at more than $2.4M – enough to keep 2,500 vehicles and 70 RSU sites deployed in AAIMS. Additionally, the equipment (items over $5,000), valued at over $350K includes servers, signal controllers and development vehicles.
In addition to continued operations and maintenance of the connected vehicle and infrastructure deployment, AAIMS will further expand the deployment by (1) equipping nineteen new pedestrian sites with Roadside Units (RSUs), vision detection systems and controllers to tie into the City of Ann Arbor's backhaul; (2) installing radar sensors at all forty-nine RSU-equipped intersections plus the corridor from US-23/M-14 to Main Street and Depot to the UM Hospital entrance that will detect unequipped vehicles and integrate with the connected infrastructure (RSUs) and City of Ann Arbor transportation system; (3) deploying DSRC roadside units along an eight mile stretch of US-23 from Ann Arbor in Washtenaw County north to Hamburg in Livingston County; and (4) increasing the penetration of connected vehicles operating in Ann Arbor. These building blocks will support the efforts planned for both the Multimodal Integrated Corridor Management and Technologies to Support Connected Communities focus areas. Each element of this priority area is described in detail.
Connected Vehicle Deployments
AAIMS will increase the number of vehicle deployments to 5000. UMTRI, as industry leaders, will continue to maintain high standards for the installations to maximize performance. Delphi, an affiliate, will provide the 2500 aftermarket safety devices and human-machine interface solutions at significant cost savings. Delphi is currently a DSRC device supplier for the Ann Arbor Connected Vehicle Test Environment (AACVTE) with a proven track record.
While most participants will be recruited from the Ann Arbor area, the AAIMS project will also recruit some people who drive on the US-23 Flex Route (see section 1.3.3 Technologies to Support Connected Communities for more details).
The number of connected vehicles in the deployment area directly impacts the safety and mobility benefits derived from having an equipped vehicle. As described in section 1.3.3 Technologies to Support Connected Communities, information from connected vehicles is used as one of the inputs to dynamic traffic control and traffic signal prioritization. Also, more vehicle deployments increases the likelihood of interacting with other equipped vehicles, which will improve safety. Finally, more vehicle deployments will result in additional pedestrian interactions, the benefits of which are also described in section 1.3.3 Technologies to Support Connected Communities.
For Safety Pilot Model Deployment (SPMD), Volpe conducted an independent evaluation of the safety benefits of vehicle-to-vehicle communications with favorable results.1 Because the independent analysis was comprehensive and would be cost-prohibitive to repeat, we do not plan on conducting further analysis specific to the increased number of additional connected vehicles. We will assume that by increasing the number of vehicles and increasing the number of V2X applications, the improvements and benefits will increase as well.
Connected Vehicle and Infrastructure Operations and Maintenance
To date, UMTRI has completed approximately 6000 DSRC installations. Each vehicle installation is done with precision to ensure a professional fit and finish. We developed a robust configuration management system to ensure that the correct data is uploaded to the DSRC radios to maximize performance. We have developed and implemented verification testing as a quality control measure and have shared this procedure with the industry. UMTRI has completed significant research into antenna performance and has selected state of the art DSRC and GNSS antennas for use in the deployment. UMTRI has become the industry expert with regards to DSRC aftermarket installations.
Another important aspect of any deployment is human subject management. UMTRI has over 50 years' experience utilizing human subjects in its research, including numerous field tests and deployments conducted for the U.S. DOT. The university has an in-house Internal Review Board (IRB), that adheres to all federal standards. All participant interactions require IRB approval.
The current AACVTE deployment is planned to be completed by the end of 2017, with Operations and Maintenance starting in January of 2018. The current deployment plans are depicted in Figure 2 and include:
- 70 infrastructure locations equipped with RSUs and state-of-the-art traffic controllers:
- 49 Intersections
- 5 Combination Intersection/Freeway Sites
- 4 Pedestrian Crosswalks
- 3 Freeway Sites
- 3 Curve Speed Warning Sites
- 1 Roundabout
- 5 Staging/Testing Sites
- Minimum 2500 Vehicle Deployments
- 2000 Vehicle Awareness Devices (VADs)
- 500 Aftermarket Safety Devices (ASDs)
The AACVTE DSRC devices meet all industry standards, are fully certified and able to communicate with the Security Credential Management System (SCMS) production environment. Furthermore, the on-board devices (VADs and ASDs) are installed on a combination of personal vehicles (1750) and fleet vehicles (750). The AACVTE contract ends in May 2018, and we anticipate a seamless transition to AAIMS. The operations and maintenance of the connected vehicles and infrastructure will be funded by Mcity and managed under AAIMS.
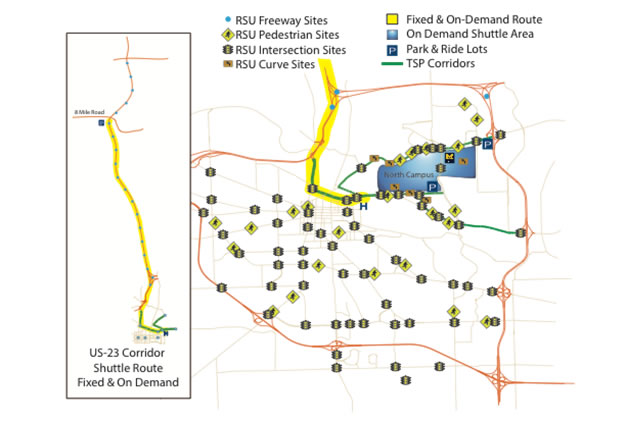
Figure 2: Connected Infrastructure Deployment
Vehicle deployment maintenance includes subject management; IRB management; removing devices if a participant moves, sells their car, etc.; repairing devices and other installed equipment; recruiting new participants and installing new devices to keep the number of deployments at a steady 2500.
The original 25 RSU sites have been maintained since 2012, led by WSP and supported by UMTRI and the City of Ann Arbor. Our team was the first in the country to install RSUs that were integrated into a city's backhaul, and the first in the country to deploy an IPv6 network.
We are recognized industry leaders in DSRC infrastructure. Maintaining the infrastructure includes keeping service contracts current on equipment as appropriate; paying for data lines that transfer RSU data from the City of Ann Arbor to UMTRI; and replacing aging or broken equipment. In addition, state-of-health monitoring is done for both vehicle deployments and the infrastructure. The uptime is monitored and issues are documented and resolved.
Vehicle Detection and Pseudo BSM Infrastructure
UMTRI will work with Econolite to install AccuScan 1000 radar sensors at intersections to generate and broadcast pseudo BSMs. This sensor is capable of providing lane-by-lane advance detection up to 1,000 feet from the radar sensor (similar to the DSRC communication range) and tracking trajectories of 32 objects simultaneously. If each approach is installed with one radar sensor, more than 100 objects in the proximity of the intersection can be tracked simultaneously. Using these radar sensors to detect all or part of vehicles, each vehicle can be assigned an identity and their trajectories can be extracted. The vehicle trajectory data will be transmitted to a data process unit, where they will be converted to the SAE J2735 BSM format. We call them pseudo BSMs because they are actually generated by the infrastructure. The pseudo BSMs will be broadcast from the RSUs located at the intersection through DSRC. The radar sensors update the list of tracked objected every 50ms. As a result, the data resolution is adequate to generate BSMs at 10 Hz frequency. The pseudo BSM generation concept is depicted in Figure 3. In addition to generating pseudo BSMs, the radar sensors can be used as vehicle detectors for traffic signal control. We plan to install the radar sensors at three intersections along Plymouth Road in year one as prototypes. Each intersection will be equipped with four radar sensors, one per approach. Once the system architecture is fully tested, we will expand to a total of 49 intersections in years two and three. The pseudo BSMs can be utilized by current equipped vehicles for V2V safety applications and by infrastructure for both V2I safety and mobility applications, as described in a subsequent subsection: Increased V2X Deployment Using Pseudo BSMs.
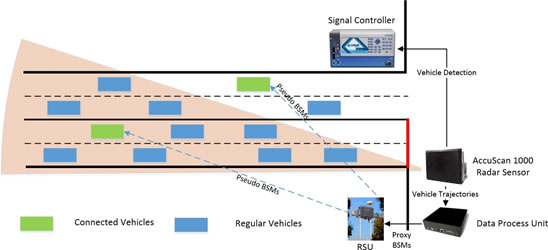
Figure 3: Pseudo BSM Generation Illustration
Pedestrian Crossing Connected Infrastructure
The City of Ann Arbor maintains an extensive network of public non-motorized improvements including 81.5 miles of bike lanes, 12.1 miles of sharrows, 58.5 miles of shared-use paths, 110 major mid-block crossings, 27 minor mid-block crossings, 18 Rapid Rectangular Flashing Beacons (RRFB) and 1 HAWK pedestrian crossing signal. Last year, there were 77 accidents involving bicycles, an increase of 63% over 2015, and there were 68 accidents involving pedestrians, an increase of 42% over 2015 - two fatalities occurred at the mid-block crosswalks.
Currently, UMTRI is engaged in a DSRC-based Vehicle to Pedestrian (V2P) project, funded by Mcity, an industry-government-academia partnership. The V2P project investigates three different technical approaches: DSRC and Wi-Fi equipped telephones (V2P), a DSRC and Wi-Fi capable vehicle/phone to RSU phone app (V2I), and camera-based pedestrian detection to RSU (V2I). The system will be deployed at four locations along Plymouth Road in late 2017 as part of the AACVTE deployment. The system and interface requirements are being developed by a team from UMTRI, Honda, Econolite, Iteris, and Savari. Once final testing is complete, the V2P hardware solution will be replicated and deployed as part of AAIMS. In addition, AAIMS will significantly expand the current V2P deployment by adding an additional 19 sites as shown in Figure 2. The deployment locations were selected with particular attention given to sites near middle schools and high schools as well as locations of previous crashes involving pedestrians. Each of the 19 new pedestrian sites will be equipped with Savari RSU with built in Wi-Fi, Econolite Cobalt Traffic Signal Controller, and Iteris PedTRAX, or equivalent, vision system that detects the presence of pedestrians in the crosswalk.
The V2P system solution will be compliant with J2735 and J2945/2. The basic V2P System Architecture is depicted in Figure 4 below, and the V2P warning system is described in section 1.3.3.
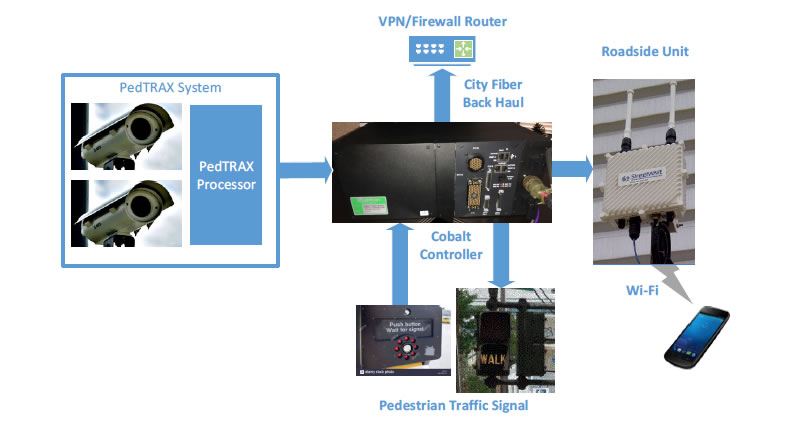
Figure 4: V2P Architecture Diagram
Performance Metrics for Connected Vehicle Technology and Intersections and Crosswalks
The performance metrics for the installation of connected vehicle equipment do not gauge system improvements on their own. Rather, system improvements are achieved by using the technology itself. Those improvements are addressed in sections 1.3.2 Multimodal Integrated Corridor Management (ICM) and 1.3.3 Technologies to Support Connected Communities. Performance metrics for the installation of connected vehicle technologies at intersections and pedestrian crossings include:
- Deploy 2500 additional connected vehicles with Aftermarket Safety Devices (ASDs)
- Equip 19 locations with roadside units, controllers, and vision systems at mid-block pedestrian crossings
- Equip 49 intersections with a radar system that detects vehicles and provides vehicle trajectory information
- Operating and Maintaining the environment with 90% uptime.
1.3.2. Multimodal Integrated Corridor Management (ICM)
AAIMS will integrate multimodal transportation on three or more corridors by expanding upon an existing, university-funded project named RITMO (Reinventing Urban Transportation and Mobility). RITMO encompasses design, deployment and evaluation of novel, on-demand, multimodal transit systems that combine the best of transit systems and the sharing economy. RITMO is built on the belief that data science is central to the design, operation and evolution of advanced mobility systems. Investigating large amounts of data will improve our understanding of existing and future services, infrastructures, mobility patterns, and energy consumption. This improved understanding will provide the foundation to build forecasting models for mobility demand, congestion, mode change, and energy needs. These forecasting models then become inputs to design and operation of advanced mobility systems.
RITMO's objectives are to dramatically improve the mobility experience for everyone commuting to Ann Arbor and to integrate on-demand transportation with existing and future multimodal transportation systems. Although Ann Arbor is a prosperous city, pockets of low income neighborhoods exist within the city limits. Further, neighboring Ypsilanti and Ypsilanti Township have significant poverty issues, and transportation or parking issues present real obstacles to working in Ann Arbor. Providing affordable, reliable and optimized public transportation for all demographics, including the poor and disadvantaged, has the potential to lift population segments out of poverty by providing access to jobs. In addition, the lives of the underserved populations can be improved dramatically by providing access to healthy food, medical care, and educational opportunities.
The RITMO project has access to substantial data sets concerning mobility, infrastructure, transit systems and congestion in Ann Arbor and the surrounding communities. In particular, the university has been collecting vast amounts of data the past five years from over 3000 individual vehicles and the equipped infrastructure from SPMD. The University is also about to instrument its entire 1000-vehicle fleet with data acquisition and is further collaborating with Ford Smart Mobility to expand Ford's Big Data Drive 2 program by instrumenting additional, personally owned and operated vehicles in and around Ann Arbor. The RITMO project also has access to boarding information for the two transit systems (UM Transit and AAATA) servicing the campus and downtown area, the origin-destination pairs of all students, staff and faculty using the university parking system, and the mobility patterns on campus through its networking infrastructure application that has been integrated into the Michigan App – a mobile suite of applications that serves students and staff on campus.
These existing and ongoing efforts and capabilities support the deployment of the following elements of a multimodal integrated corridor management system in AAIMS: on-demand shuttles integrated with the transit systems, unique route-optimization tools- and a data analytics framework.
On-Demand Mobility: Dynamic Shuttle Deployment and System Integration with Transit:
The RITMO project leverages existing research that is based on the deployment of a hub-and-shuttle public transit system operating in Canberra, Australia (BusPlus),2 as well as two years of development specific to the Ann Arbor/Ypsilanti area. RITMO is part of a larger commitment made by the University of Michigan to improve transportation through the use of connectivity, automation and data analytics.3 The AAIMS deployment will combine on-demand shuttles – leveraging Ford Smart Mobility's extensive experience in Dynamic Shuttle Service – with high-frequency buses in high-density corridors operated by two transit agencies (UM Transit and AAATA). Passengers will hail rides using a smartphone app that communicates to a cloud computing platform that calculates the most efficient journey for a given destination—it could be a direct shuttle ride from A to B, a shuttle followed by a bus trip, or any similar combination. In doing so the first/last mile transit problem is addressed. The phone application will track the progress of each passenger and each vehicle, feeding data to a back-end system that optimizes routing and dispatching decisions in real time to minimize congestion, maximize ride sharing in shuttles, and minimize waiting and transit times. RITMO uses smartphones, driver tablets and a cloud computing platform as integrated elements of transportation infrastructure.
Ann Arbor is uniquely well-suited for implementing this novel on-demand transit system given its significant transit ridership (up to 50,000 riders a day) over a small geographical area. The campus and downtown areas feature congested corridors, peak periods spread across the entire day, areas of high and low density, considerable parking issues, and Park & Ride infrastructure located in and on the edge of the city. The buses experience overload situations on the congested corridors and low ridership on the long heads and tails of the bus routes. The proposed deployment will address critical issues (first/last mile, congestion, greenhouse gas emission, and urban sprawl) with a controlled and data-rich environment, the results of which can be scaled to cities of nearly any size. Initially, the deployment will occur in and between areas of the university campus, operating on highly congested corridors where the demand for transit frequently exceeds the supply. A dynamic shuttle will be utilized to remove the low-ridership heads and tails of the bus routes. Later, implementation will be expanded to neighborhoods adjoining the university campus to the north, east, and west in order to solve the first/last mile problem for a significant portion of people commuting to campus, relieving pressure on the parking system and encouraging a mode change from commuting by car to using an on-demand transit system.
Route Optimization
The software powering the on-demand multi-modal transit system is based on predictive and prescriptive analytics, applying forecasting models to mobility patterns over time to drive optimization models. The deployment will utilize an existing and novel application for planners which employs optimization models to choose the best hub-and-spoke networks, size the vehicle fleets optimally, determine the optimal driver shifts to minimize cost, and dispatch and route vehicles in real time to maximize convenience and avoid congestion.2 This interactive tool will be connected to the additional optimization algorithms to evaluate the impact of the hub choice, bus routes, and bus stops on the overall cost and convenience of the transit system. Expertise in the development of these software components, as well as the user interfaces, exists within the University of Michigan, which features some of the world's experts in routing and dispatching optimization and network design, as well as an outstanding team in cloud computing and mobile applications.
Mobility Passport and Operations Management (Data Analytics Framework)
Authentication |
|---|
Subscription |
Wallet |
Loyalty Services |
Mobility Services |
City Logistics |
Connectivity |
One of the primary goals of RITMO is human-centered mobility, the idea that mobility services should be naturally integrated in the online experience of the riders. As a result, the RITMO project is developing Mobility Passport – an application that encompass the entire mobility online experience in layered architecture. The application contains a connectivity layer, while the city logistics layer gives users access to real-time information about the transit systems, sharing services, parking, congestion, accidents, and forecasting models of such information. It can also be used to recommend the best services to fulfill a mobility need at a particular place and time. The mobility services layer provides access to the on-demand transit system, to request rides and to make reservations; it also connects the transit system with adjacent transit and regional networks, as well as other services, including car and ride sharing programs and parking reservation systems. The loyalty layer includes frequent rider award programs, incentive mechanisms to shift demand, and captures the mobility history of riders. The wallet layer captures secure payment information, the subscription layer enables user to subscribe to various services such as alerts and notifications, and the authentication layer provides secure and certified access to all services. Mobility Passport is similar to FordPASS, and its deployment will significantly benefit from Ford Smart Mobility's experience in the deploying this type of human-centered mobility system.
Performance Metrics for Multimodal Corridor Management
The performance improvements are easily measured, and include:
- Accessibility: serving populations with limited mobility options
- Wait times: reducing average wait times overall
- Transit times: reduce transit times through optimization and analytics
- Cost of operations: reduce costs by shortening transit routes in areas of low ridership The safety, mobility, and environmental benefits can also be quantifiable:
- Mobility: solving the first/last mile problem associated with transit
- Parking: remove the pressure on parking structures and lots by increasing use of transit
- Safety: any benefit of automated cars will naturally translate to this type of deployment
1.3.3. Technologies to Support Connected Communities
The following elements of the AAIMS proposal are intended to address safety and congestion issues in, and around, the City of Ann Arbor. Each of these elements addresses a real mobility problem, and does so by maximizing existing equipment and deployment efforts while introducing demonstrated approaches to further improve safety and reduce congestion.
Vehicle-to-Pedestrian (V2P)
Currently the University is engaged in testing and early deployment of V2P at four locations in Ann Arbor. For the initial deployments, mid-block crosswalks – as opposed to intersections – have been targeted because they present more interesting challenges to both vehicles and pedestrians, and because the city of Ann Arbor is particularly interested in investigating counter-measures for these types of sites. While the majority of the 175 crashes involving pedestrians over the last three years have taken place at intersections, pedestrian fatalities that have occurred during the same period were at mid-block locations.
The existing project investigates three different technical approaches to wirelessly connect vehicles and pedestrians:
- A DSRC-capable telephone application which broadcasts Pedestrian Safety Messages (PSM) directly to properly equipped vehicles (V2P);
- A Wi-Fi-capable telephone application which communicates directly to an RSU, which then redistributes the signal to properly equipped vehicles (V2I); and
- A camera-based pedestrian detection system which also uses an RSU to distribute information on detected pedestrians to properly equipped vehicles (V2I).
The first approach consists of 30 phones which will be distributed to participants in the northeast Ann Arbor area. A questionnaire is being distributed to 200 participants in the area to collect information on their walking patterns and to gauge their interest in participating in V2P research. A subset of these participants will be selected to help pilot test the vehicle and phone applications in a controlled environment. Once the functionality of both the phone-based and vehicle-based applications are approved via the closed-course demonstrations, the application will be loaded onto 30 phone handsets. These phones will be given to participants reporting regular walking trips through the targeted crosswalks. The phones will have their OEM Wi-Fi chips repurposed, via a firmware upgrade, to transmit DSRC signals when they are within pre-set "geo-fenced" areas in, or near, one of the four targeted crosswalks. When outside of these areas, the phones' Wi-Fi chips will work normally.
500 vehicles will be equipped with aftermarket DSRC devices in parallel to the phone distribution and RSU installation. For any of the three pedestrian detection/broadcast modalities mentioned above, the aftermarket devices will be able to:
- Inform drivers whenever the crosswalk button is pressed (pedestrian waiting to enter the crosswalk);
- Inform drivers whenever a pedestrian is in the crosswalk (or crossing the road in close proximity to the crosswalk); and
- Warn drivers about imminent pedestrian conflicts at the targeted crosswalks.
AAIMS will significantly expand these deployments by installing additional infrastructure and vehicle equipment around the city. Whether at intersections or mid-block, sites near middle schools and high schools, as well as locations of previous crashes involving pedestrians, will be highly prioritized. Reference section 1.3.1 for further details.
The experimental design for the Mcity-sponsored V2P project (initially four crosswalks) will not be complete until August 2017. When the four pedestrian crosswalks are fully operational, the V2P team will analyze the three types of deployed V2P systems by executing the test plan and determine the performance and benefits of each. Although not funded through this project, the results will be shared with U.S. DOT for the use by other agencies nationwide.
Incident, Work Zone, Weather, and Event Management
The US-23 Flex Route spans from M-14 in Washtenaw County to Silver Lake Road in Hamburg. Construction of the Flex Route will be completed in the fall of 2017. The construction plans made provisions for potential installation of connected vehicle technology. AAIMS plans to install 17 RSUs along this corridor: one at the start, one at the end, and one every ½ mile of freeway (reference Figure 2). The connected vehicle data will be integrated into the overall AAIMS data backhaul. This significant event is the first foray into expanding the connected vehicle infrastructure outside of Ann Arbor and will require substantial effort to stream the data from MDOT to the City backhaul. MDOT will fund the installation and integration of the RSUs along the US-23 Flex Route as part of the grant match. Once the infrastructure is deployed, the intent is to deploy aftermarket safety device-equipped vehicles in that area that have work zone applications on board. The RSUs will broadcast information about work zones, including: work zone ahead, speed warning, and lane closure events. The US-23 RSU network will also improve road weather and incident management, as well as emergency response.
Increased V2X Deployment Using Pseudo BSMs
One critical barrier for utilizing connected vehicle trajectory data is the low penetration rate of connected vehicles. Previous research indicated that typically 20% - 30% of the vehicle fleet must be connected in order for connected vehicle applications to be effective.4 It may take years to reach the critical penetration rate – even if DSRC installation in new vehicles is mandated. Meanwhile, when the penetration rate is low, there is little benefit to equipped vehicles, which discourages the purchase of DSRC units in the absence of a mandate. By generating pseudo BSMs from radar sensors, we can greatly increase the "penetration rate" around intersections for both V2V and V2I applications.
Vehicles equipped with DSRC devices that are within communication range will receive the pseudo BSMs in addition to BSMs broadcast by other equipped vehicles in the vicinity. Equipped vehicles can utilize the pseudo BSMs for certain V2V safety applications such as forward collision warning (FCW), emergency electronic brake light (EEBL), blind spot/lane changing warning, and intersection movement assist (IMA). By tracking approaching vehicle trajectories, the infrastructure can identify vehicles running red lights and vehicles in the dilemma zone. As a result, equipped vehicles can also benefit from V2I safety applications such as red light violation warning and dilemma zone warning.
In addition to safety, pseudo BSMs can also be utilized to improve mobility at intersections. Compared to traditional loop detector data, vehicle trajectories from pseudo BSMs provide a substantially more complete picture of traffic conditions. With the tracking ability of 32 vehicles from a single approach, the penetration rate can be easily increased to more than 50% where existing connected vehicle-based traffic signal control algorithms5 can be implemented to reduce traffic congestion.
User Experience to On Demand Mobility
The United States is experiencing a transition from an era where car ownership was the best predictor of upwards social mobility and a symbol of freedom, to a period where millennials are fully comfortable in using shared mobility services and transit systems and in not owning a car. A move to on-demand mobility, and in particular services addressing the first/last mile problem, has the potential to transform mobility in fundamental ways that could not have been envisioned even a few years ago. Integrating mobility with the rider's online experience will be critical: recurrent trips should not require more than one click, premium services should be available to those riders not comfortable with ride sharing, and incentives and pricing mechanisms should be available to encourage better utilization of the services. Even more important perhaps, mobility must be integrated with social media: in order to build trust in novel mobility systems, riders and driver must be able to share their experience in real time.
The mobility services deployed in Ann Arbor through the AAIMS project will allow us to examine, for the first time, the impact of a novel on-demand transit systems on mode change, including the reduction the number of cars in households and the pressure on parking structures. Data from AAIMS will reveal the preferences of entire segments of the population, and how to best incentivize them, using A-B tests, to maximize adoption and the overall efficiency of the system. Similarly, the data will elucidate the role of social media in the adoption and the perception of these systems, the degree of tolerance to transfers and ride sharing detours, and the benefits of reduced waiting time. Finally, AAIMS will also provide a measure of how an on-demand transit system changes the fabric of social interactions by making it simpler for people to meet, collaborate, and attend events that they would not travel to otherwise. Such measures will also reveal how cities may change through more advanced and effective mobility services.
Transit Signal Prioritization
Traditional transit signal priority (TSP) uses loop detectors or vehicle-based signal emitters to request service in a "check-in/check-out" method. Usually, the first-in-first-out (FIFO) strategy is adopted when multiple transit vehicles arrive at one intersection at the same time from conflicting movements. This may not be the best solution. Moreover, current priority systems can't differentiate types of vehicles, priority levels, vehicle routes and vehicle status; they merely provide the same priority for all transit vehicles at all times.
We propose a new TSP system in Ann Arbor's connected vehicle environment to consider transit type, operation schedule, number of passengers, etc. When a transit vehicle approaches an intersection, it will send priority request messages via DSRC that include much more information than just an arrival notification. Data such as vehicle status (location, speed, acceleration, heading, etc.), estimated time of arrival, requested signal phase, priority level, number of passengers on board, and whether it is behind schedule, can all be used to determine whether and how to grant priority to each transit vehicle. For example, an early bus with a few passengers may not receive priority, while a full and late bus may. The proposed TSP system can also be integrated with the dynamic traffic control system discussed below. Combined with current traffic conditions estimated from trajectory data of other vehicles, a joint traffic control strategy can provide priority to transit vehicles, while minimizing negative impacts on general traffic. The proposed connected vehicle-based transit priority system will provide more efficient and accurate control based on current traffic conditions and other factors.
As part of the AACVTE, 152 transit buses from two transit agencies are already equipped with DSRC. AAIMS will result in deployment of TSP on multiple corridors in Ann Arbor where transit volumes are already very high – particularly between regions of the University campus and where efforts are being made to reduce the number of vehicles entering the City by encouraging commuters to leave their vehicles at Park & Ride locations. The AAIMS' TSP deployment will include a minimum of three corridors (refer to Figure 2):
- The first corridor is an intercity route beginning 12 miles from a 200-space Park & Ride lot located off a major highway (US-23) north of Ann Arbor and terminating on surface streets near the medical center. TSP deployment will address significant congestion associated with commuter traffic.
- The second corridor is a two-mile intra-city route that links the University's north and central campuses, where currently there is an average of one transit bus every three minutes – every two minutes during peak travel times. Because the transit demand often exceeds supply on this route, TSP will enable increased ridership over a fixed time period using the same number of buses.
- Transit on the third corridor includes a mix of commuter and intra-city travel. This corridor begins at a Park & Ride lot located off of US-23 on the northeastern edge of the city, extends four miles and passes through several neighborhoods along the route to the University's medical center.
Dynamic Traffic Control
Many existing traffic signal control systems rely upon fixed-location vehicle detection sensors, e.g., loop detectors, to provide inputs to the control mechanisms. Installation and maintenance of these detector-based signal systems is costly, and they are prone to frequent detector errors and failures. As a result, many existing traffic signals are simply operated as fixed-time control. The University has developed a dynamic traffic signal control approach using crowd-sourced vehicle trajectory data, and AAIMS will allow the University to deploy this technology in Ann Arbor. One of the advantages of this system is that it can be implemented in very low DSRC penetration rate environments (e.g. under 5%), which is especially suitable at the early stage of connected vehicle deployment.
In the AAIMS project, crowd-sourced vehicle trajectory data will be gathered through BSMs broadcast from DSRC-equipped vehicles as well as pseudo BSMs generated by RSUs at intersections. Utilizing vehicle trajectory data, an integrated platform for evaluation and optimization of traffic signals has been developed with three main functionalities: traffic demand estimation, performance evaluation, and signal timing optimization.6 For traffic demand estimation, the system can approximate traffic volumes of all movements at intersection by leveraging cyclic traffic patterns based on trajectory and signal status data. For the performance evaluation, the system can detect congestion and assess coordination quality along signalized roads to find potential areas for improvement. For example, Figure 5 shows the vehicle trajectory data for eastbound vehicles arriving at the intersection of Green Road and Plymouth Road from the SPMD. The arrival patterns show that about 75% of vehicles arrived at the intersection when the signal was red, which indicates a potential opportunity for offset adjustment. For signal timing optimization, a hierarchical optimization process is developed to improve settings, including timing plan schedule, network zone partitioning, as well as cycle length, green split and offset. Based on the optimization process, traffic signals can be adjusted dynamically in response to traffic demand variation. With the ability to eliminate dependence of the traffic signal system on fixed-location traffic sensors, the proposed system will be extremely beneficial to enabling traffic management agencies to cost-effectively improve traffic signal operation.
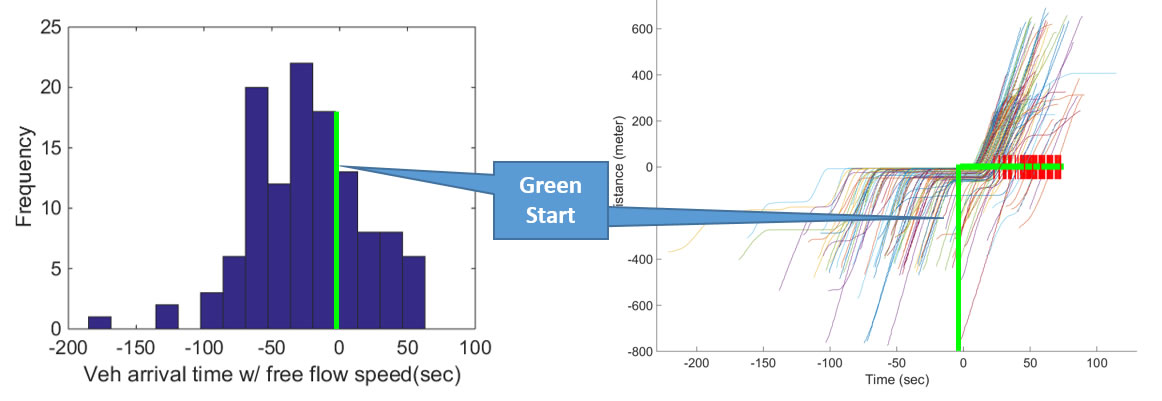
Figure 5: Vehicle Trajectory Data from Safety Pilot Deployment Project
US-23 Flex Route Connected Infrastructure Integration and Shuttle Deployment
Every day, an average of 60,000 to 65,000 vehicles travel US-23 between Ann Arbor and Silver Lake Road. Congestion and delays are common, especially in the southbound direction during the morning peak hours and the northbound direction during the evening peak hours. To lessen the impacts of heavy directional commuter travel patterns and to promote safety, MDOT is making several improvements to the corridor – the most significant of which is the installation of a Flex Route system to manage peak-hour traffic congestion. The new Flex Route system is a lane control system with a hard-running shoulder that uses cameras and electronic message boards to let drivers know when the hard-running shoulder is available for use during morning and afternoon peak travel periods. The Flex Route system is monitored by MDOT's Statewide Transportation Operations Center through their ITS network. The AAIMS program will build upon the Flex Route project by further upgrading this eight-mile highway corridor with RSUs that are integrated into the Flex Route system and mounted on existing gantries.
Because much of the peak traffic is associated with commuters to or from the University, coordination of the existing connected vehicle infrastructure in Ann Arbor, the new RSU's on the US-23 corridor and the Flex Route system will considerably improve management of the traffic entering and exiting the city. Data from probe vehicles, as well as on-street RSUs, can be used to coordinate both the hard-running shoulder availability and route suggestions to the electronic message boards along US-23. Additional equipment will include radar sensors installed along major arterials where the US-23 corridor traffic enters the city (North Main Street and Plymouth Road). Detection of significant congestion by radar located near US-23 off ramps, along with the data from the connected vehicle infrastructure on the highway, will be used with the dynamic traffic control system (described above) to manage traffic flow on US-23 as well as signal timing on major surface streets which US-23 traffic spills onto.
The AAIMS program will also establish a shuttle service along the US-23 corridor to the University's medical complex from a new Park & Ride lot at Eight Mile Road - installed as part of the US-23 upgrades. This shuttle is intended to alleviate congestion along the route (US-23 and surface streets) through a combination of dynamic and fixed route service offerings that will integrate with the connected infrastructure technology to provide measurable positive impacts on congestion. The shuttle service will operate on a fixed schedule during peak hours, with the shuttles serving as probe vehicles, and as an on-demand dynamic route service at off-peak hours between the morning and afternoon peaks. It will specifically serve University employees working in and near the medical complex. The surface street corridors utilized by the shuttle will be equipped with TSP (described above) to minimize shuttle travel times. The shuttle service will also alleviate parking congestion around the medical complex by as many as 200 parking spaces. Shuttle stops will coincide with UM Transit and AAATA stops in addition to fixed destinations.
Ford Smart Mobility's existing shuttle solutions and vehicles will maximize the benefits of shuttle deployment in the AAIMS program. Their experience will contribute significant expertise in the areas of solution engineering, operation and customer experience of the shuttle service. Ford's existing and advancing analytic and modeling capabilities are proven, and their contributions will result on a robust shuttle deployment solution.
Further impacts of offering the shuttle for employees at the University include improved quality of life for the ridership and positively impacting hospital operations through the reduction of staff overtime and more timely staffing that are currently interrupted by congestion and parking difficulties. The resulting analytics capabilities and operational deployment solutions will provide a template that can be replicated across many other urban environments.
Performance Metrics
The performance improvements are easily measured, and include:
- Improved levels of service on affected corridors and decreased travel times
- Improved user experience of the transit system
- Decreased delays and wait times at intersections, particularly for transit on TSP equipped corridors
- Increased availability of parking near the medical complex
- Reduced congestion on equipped corridors
The safety, mobility, and environmental benefits can also be quantifiable:
- Decreased intersection-related crashes
- Decreased incidents of pedestrian involved crashes and near crashes
- Decreased transit fuel consumption, and related emissions
1 Nodine, E., Stevens, S., Lam, A., Jackson, C., & Najm, W. G. (2015, December). Independent evaluation of light-vehicle safety applications based on vehicle-to-vehicle communications used in the 2012-2013 Safety Pilot Model Deployment. (Report No. DOT HS 812 222). Washington, DC: National Highway Traffic Safety Administration. [ Return to Note 1 ]
2 Maheo, A., Kilby, P., and Van Hentenryck, P. (to appear). Benders Decomposition for the Design of a Hub and Shuttle Public Transit System, Artificial Intelligence (cs.AI) [ Return to Note 2 ]
3 University may begin testing new kind of on-demand system. The University Record, the University of Michigan, October 31, 2016. [ Return to Note 3 ]
4 Day, C.M. and D.M. Bullock, Detector-Free Signal Offset Optimization with Limited Connected Vehicle Market Penetration: A Proof-of-Concept Study. Transportation Research Record, Vol 2558, pp. 54-65. 2016. [ Return to Note 4 ]
5 Feng, Y., K.L. Head, Khoshmagham. And Zamanipour, M. A Real-time Adaptive Signal Control in A Connected Vehicle Environment. Transportation Research Part C: Emerging Technologies. V55. pp. 460-473, 2015 [ Return to Note 5 ]
6 Zheng, J. and Liu H.X. Estimating Traffic Volumes for Signalized Intersections Using Connected Vehicle Data. Transportation Research Part C: Emerging Technologies. V79. Pp. 247-362. 2017 [ Return to Note 6 ]